The Big Picture
Implicit coordination through a shared pressure signal lets simple AI agents solve scheduling problems far more often than hierarchical managers, with much less overhead.
ON THIS PAGE
The Evidence
Agents that observe a shared 'pressure' map of a task and make local, greedy fixes reach solutions more reliably and faster than systems that use explicit managers or conversation-based coordination. On meeting scheduling, pressure-driven agents reached a 48.5% aggregate solve rate versus 1.5% for hierarchical control and 12.6% for conversation-style coordination. Adding a slow decay to pressure values prevents getting stuck and improves solve rates by about 10 percentage points; the method also scales to harder problems where baselines often fail.
Data Highlights
1Pressure-field coordination achieved a 48.5% solve rate vs 1.5% for hierarchical control and 12.6% for conversation-style coordination (p < 0.001).
2Disabling temporal decay reduced solve rates by about 10 percentage points (ablation reported 96.7% → 86.7% in the tested config).
3On medium and hard scheduling problems pressure-field solved 43.3% and 15.6% respectively while all baselines returned 0% on those difficulty levels.
What This Means
Engineers building multi-agent systems and technical leaders deciding architecture trade-offs—especially for scheduling, planning, or constraint-solving tasks—should consider shared-pressure coordination because it offers simpler implementation and often better performance. Researchers studying decentralized coordination or swarm-like methods will find a practical mechanism and theoretical convergence guarantees to explore further.
Not sure where to start?Get personalized recommendations
Key Figures

Fig 2: Figure 1: Strategy comparison by difficulty level. Error bars show 95% Wilson Confidence Intervals. Pressure-field outperforms all baselines at every difficulty level. On medium and hard problems, only pressure-field achieves non-zero solve rates.

Fig 3: Figure 2: Ablation study results. Left: feature matrix showing which components are enabled. Right: solve rates for each configuration. Decay provides the largest contribution (+10%), followed by examples (+6.7%). Inhibition shows no detectable effect.
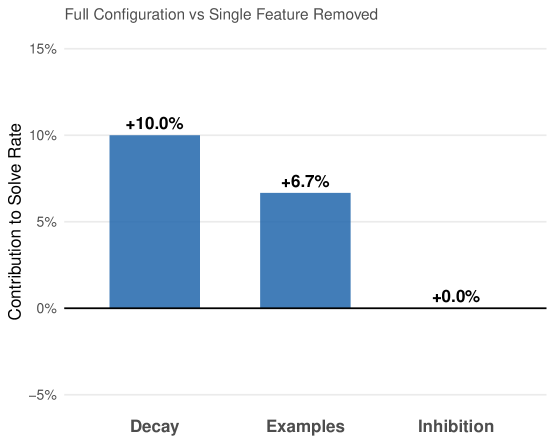
Fig 4: Figure 3: Individual feature contributions to solve rate. Decay contributes +10.0%, examples contribute +6.7%, and inhibition shows no measurable effect in this domain.
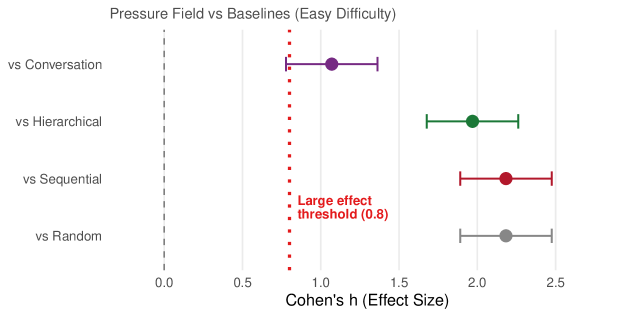
Fig 5: Figure 4: Effect sizes (Cohen’s h h ) for pressure-field versus each baseline on easy problems. The dashed line indicates the “large effect” threshold ( h = 0.8 h=0.8 ). All comparisons exceed this threshold, with effects ranging from h = 1.07 h=1.07 (vs conversation) to h = 2.18 h=2.18 (vs sequential/random).
Ready to evaluate your AI agents?
Learn how ReputAgent helps teams build trustworthy AI through systematic evaluation.
Learn MoreKeep in Mind
Results come from meeting-room scheduling experiments; domains with strong cross-region coupling (where a local fix often breaks distant constraints) may not see the same gains. The convergence guarantees require pressure alignment and bounded cross-region effects, which need to be validated for each new domain. Performance depends on how the pressure function is defined and on careful tuning of decay and patch-validation settings. (cross-region coupling)
Methodology & More
Agents operate on a shared artifact split into regions; each region holds content and a numeric pressure that measures local quality (higher pressure means worse). Agents repeatedly propose local patches that reduce regional pressure. A central validator accepts the best pressure-reducing patches per region in parallel; accepted patches update the shared artifact and the pressure map. A temporal decay slowly reduces pressure over time, encouraging continued exploration and preventing early convergence to suboptimal states. Theory shows that if local pressure reductions reliably imply global pressure reductions (alignment) and cross-region influence is limited, repeated local improvements guarantee convergence to a stable basin. Empirically on 1,350 scheduling trials, this approach outperformed hierarchical and conversation-based baselines, delivered faster convergence (mean solved ticks ~17.8) and scaled to medium and hard instances where baselines failed. Key advantages come from lower coordination overhead (fewer external planning calls) and parallel validation of many local proposals, making greedy local moves highly effective when the problem decomposes spatially or temporally. (parallel validation) (local proposals)
Avoid common pitfallsLearn what failures to watch for
Credibility Assessment:
Single author with no affiliation or reputation signals and arXiv preprint — low credibility.